|
流量控制阀简介
自动控制概念所指的范围很广,涉及的控制变量包括温度、压力、流量、液位和速度。
本章的目的是对自动控制作一个简单的介绍,主要包括以下两部分:
口供热、通风及空气调节系统(简称日VAC )
口制程控制
上面所涉及的两个领域所覆盖的范围相当广,后者所指的范畴小到一个简单的家用煮锅的控制,大到一个大型的综合石化工厂的完整的生产系统和制程的控制。
控制工程师需要掌握各种不同的技能一包括机械工程、电气工程、电子系统和气动系统、日VAC系统的设计和制程应用,而在今天还需要了解计算机技术和数字通讯技术。
本章的目的是从最基础的角度来了解自动控制的应用和理论,而不是将每个人都培养成控制工程师,以后会补充进其它的内容。
本文将控制制程所用的流体限于以下几种:蒸汽、水、压缩空气和热油。
通常通过控制阀来改变流体的流动来实现控制。对上面所提到的流体而言,控制过程通常要求测量其温度、压力、液位、湿度和流量,并且对这些参数的变化作出相应的反应。这些物理参数的改变通常需要一定的时间,阀和执行器的操作时间以及被测参数的精确控制将在以后的章节中解释。
流体的控制不仅限于阀,在某些制程中,流体的控制是通过变频泵或风机的动作而实现的。
自动控制的必要性
设备制程或楼宇控制需要自动控制主要有以下三个原因:
口安全一设备或制程的操作必须要保证安全。
设备或制程越复杂、危险性越高,就越需要自动控制和安全保护协议。
口稳定一设备和制程的运行必须具有稳定性、可预见性和重复性,并且没有振荡和意外停机。
口精确一这是工厂和楼宇中为防止产生废品、提高产品质量和生产效率、维持人体舒适感的最基本的要求,是保证经济效率的基础。
其它要求如经济、速度和可靠性也很重要,但是它们同控制应用的三个主要衡量因素安全性、稳定性和精确性是相背的。
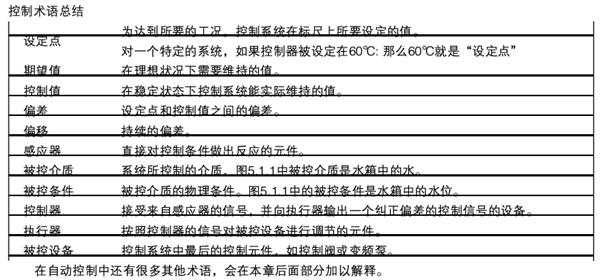
自动控制术语
控制行业使用一些专用术语,主要用来避免混淆。相同的单词和短语可以用于控制的各个方面,在使用正确时,它们的意思是独一无二的。
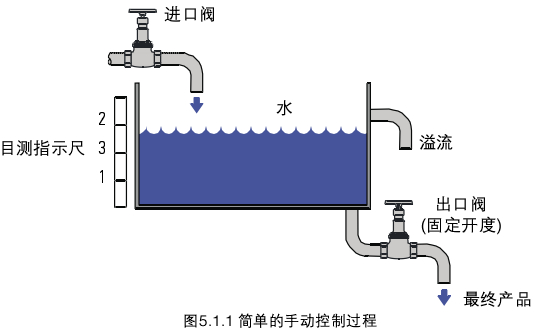
例5.1.1所示的是一个简单的手动调节系统,图5.1.1是系统图,我们用这个例子来介绍一些控制工程的标准术语。
例5.1.1一个简单的模拟控制系统
在图5.1.1所示的制程控制实例中,通过人工控制进口阀的开关来手动控制进水流量,以确保:
口水位不会过高;否则溢流会造成浪费。
口水位不会过低;否则不能充满整个水箱底部。
这样的结果是水按照要求以一定的速率流出水箱。如果水流的速度太高或太低,那么就不能对下游的用水制程进行很好的控制。
在初始状态下,排放管的出口阀保持在一定的开度。
操作者在水箱边上划了三根线以方便他控制进水阀。这三根线代表的意思是:
1.最低允许水位,来保证水箱底部能充满水。
2.最高允许水位,确保没有水流经溢流阀排放。
3. 1和2之间的理想水位。
上例(图5.1.1)表示:
1.操作者的目的是将水箱的水位维持在1和2之间。水位被称作被控条件。
2.通过控制进口管道上的阀来控制进水流量以达到控制条件。流量就是调节变量,进口阀就是被控设备。
3.水本身被称为被控介质。
4.通过控制进入水箱的水流量,水箱中的水位就改变了。水位的改变被称作被控变量。
5.水箱中的水被称作被控介质。
6.需要维持的指示尺上的水位被称作设定值(也称作设定点)。
7.水位被控制在指示尺上的1和2之间的任一点时,能满足控制参数的要求,也就是水箱底部能充满水
并且没有溢流。在此范围内的所有值被称作期望值。
8.假设水位能维持在1和2之间的任意值,在稳定状态下的水位,称为控制值或实际值。
注:参考(7)和(8),理想的水位是维持在点3。如果实际值是在1和2之间的任何点,仍然能满足条件。
设定点和实际值之间的差值称作偏差。
9.如果进水阀关到一个新的位置,水位就会下降,偏差就会改变。持续的偏差被称作偏移。
自动控制的组成元素
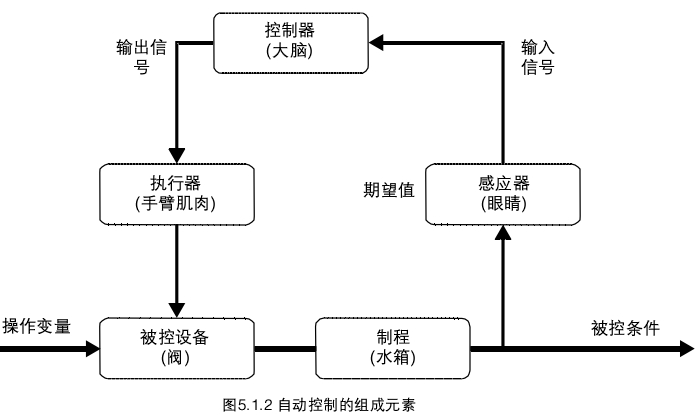
例5.1.2自动控制的组成元素
口操作者从行程标尺上感应到的是水位的变化。他的眼睛可以看成是一个感应器。
口眼睛(感应器)将信号传回给大脑,大脑注意到偏差。大脑可以看成是一个控制器。
口大脑(控制器)的作用是向手臂肌肉和手发出信号,可以看作一个执行器。
口手臂肌肉和手(执行器)将阀打开,阀可以看成是被控设备。
在此需要以略微不同的方式重申例5.1.2.
在例5.1.1中,简单来说操作者的目的是将水箱中的水控制在预定的水位。液位3可以看成他的目标,或者说设定点。
操作者通过调节进口阀(被控设备)的开度来达到手动调节水位的目的。在操作过程中需要将操作者的能力和专心程度考虑进去。因此,水位不能在任何时候都精确维持在3的位置。在任何特定时候的水位可以被称为控制值或实际值。
设定值和实际值之间的差值称为偏差。一个恒定的或稳定的偏差,称作持续偏差或偏移。
尽管操作者是进行手动操作水位,最终的目的要得到一个正确的输出,在本例中是指一个稳定的水箱流量输出。
安全性、稳定性和精确性的评定
在例5.1.1的典型应用中,假定制程既不是贵重流体也不是有害介质。因此,溢流或缺水的状态也是安全的,但是这个过程不经济,效率低。
从稳定性来说,操作者必须全神贯注地进行制程控制操作。
此例中,因为操作者仅仅对于目测的水位做出反应,进行控制,精确不是一个很重要的特征。
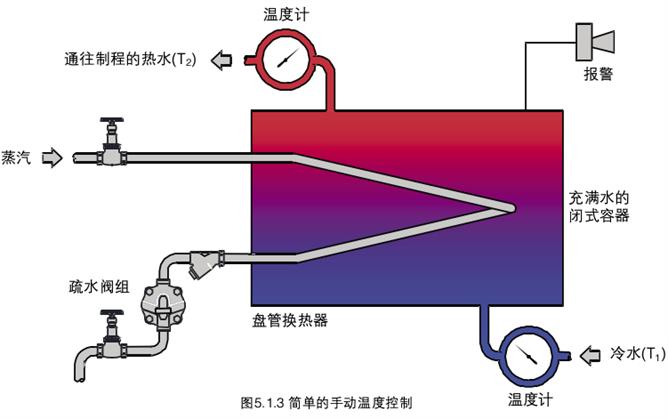
温度调节系统的组成元素
例5.1.1描述了一个简单的手动液位控制系统,我们可以同例5.1.3(手动控制)和图5.1.3的温度控制做一下比较,所有之前的要素和定义都适用。
例5.1.3描述一个简单的手动温度控制系统
目的是通过足够量的蒸汽(加热介质)来加热入口温度为丁1的水,保证水箱出口的热水温度为T2.
安全性、稳定性和精确性的评定
例5.1.1中通过手动操作可以大致控制水位,但是例5.1.3中的手动温度控制由于各种原因要相对困难一点。
如果水的流量发生变化,由于蒸汽中所含的大量的热量,工况就会迅速发生变化。操作者来不及及时手动改变蒸汽阀开度。即使阀全关后,盘管内仍残留一定量的蒸汽,冷凝时会继续放出热量。
预期变化
虽然可以依靠经验,但是通常操作者无法预期变化。他必须在作出操作决定之前观察变化。
由于这样或那样的原因,如长期人工操作的不方便和费用问题、潜在的操作误差、制程要求的变化、精确性、工况的快速变化以及多个制程之间的相互影响,所有一切都导向自动控制。
考虑到安全性,在5.1.3中引进声音报警装置对超温进行报警一这也是另一个采用自动控制的原因。
自动控制
被控条件可能是温度、压力、湿度、液位或流量。也就是说测量元件可以是温度感应器、压力变送器、液位感应器、湿度感应器或流量感应器。
调节变量可以是蒸汽、水、空气、电流、油或气,而被控设备可以是阀、节流阀、泵或风机。
为阐述基本原理,本章以阀作为被控设备,温度作为被控条件,温度感应器作为测量元件。
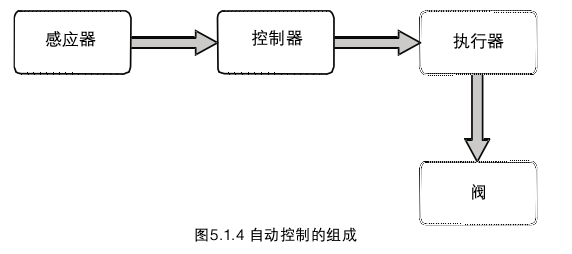
自动控制的组成
图5.1.4阐述了一个基本控制系统的组成部分。感应器将信号传递至控制器。控制器接受来自感应器的信号(可能多个),并基于这些信号决定是否需要改变调节变量。然后控制器向执行器发出命令将阀位移动到另一个位置,按照需求开大或关小。
控制器通常按照驱动能源划分为:电动、气动、液压或机械。
执行器可以看成一个电机,执行器通常也按照驱动能源划分,种类与控制器相同。
阀的种类按照它们的开关动作对流量的影响和阀体结构来划分,如直行程阀或角行程阀。
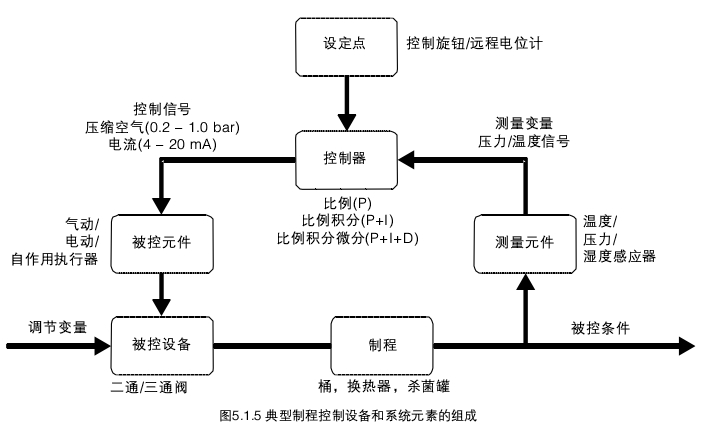
如果我们把控制系统的各个要素同系统部件(设备)相结合,就可以看出“需要做什么,”与“如何去做,”之间的关系。
有些术语也许还不太熟悉,在第5章后面的部分,我们会对上述图中的各部分将进行阐述。
以上内容由彪维公司(www.bilvie.com)编写,转载请注明文章出处。 |





